Project description:
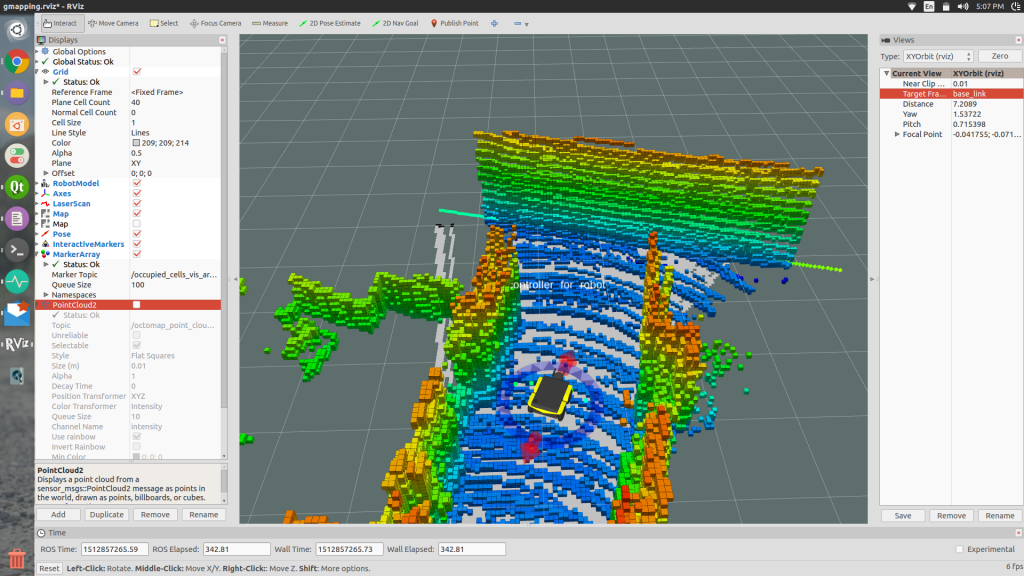
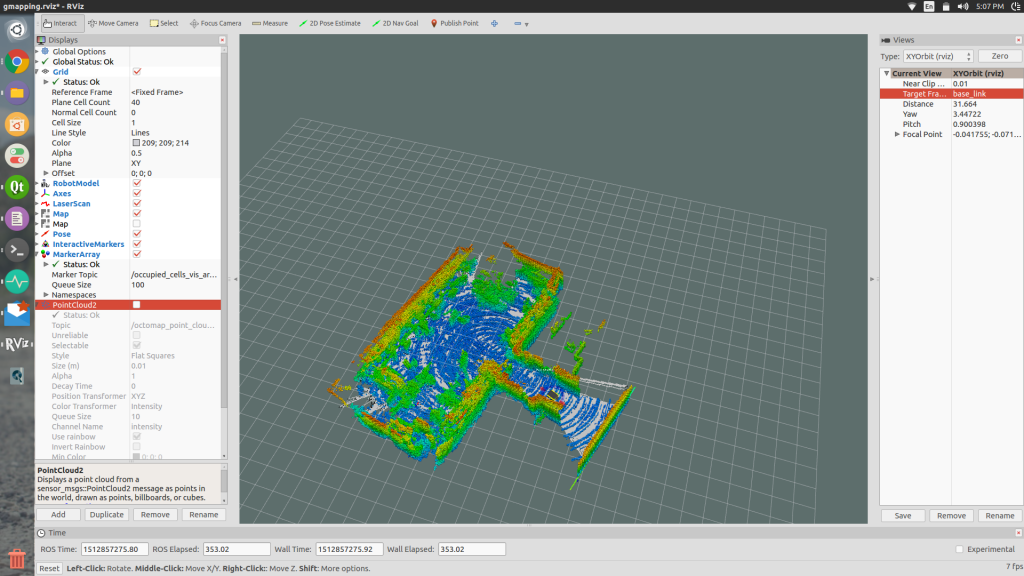
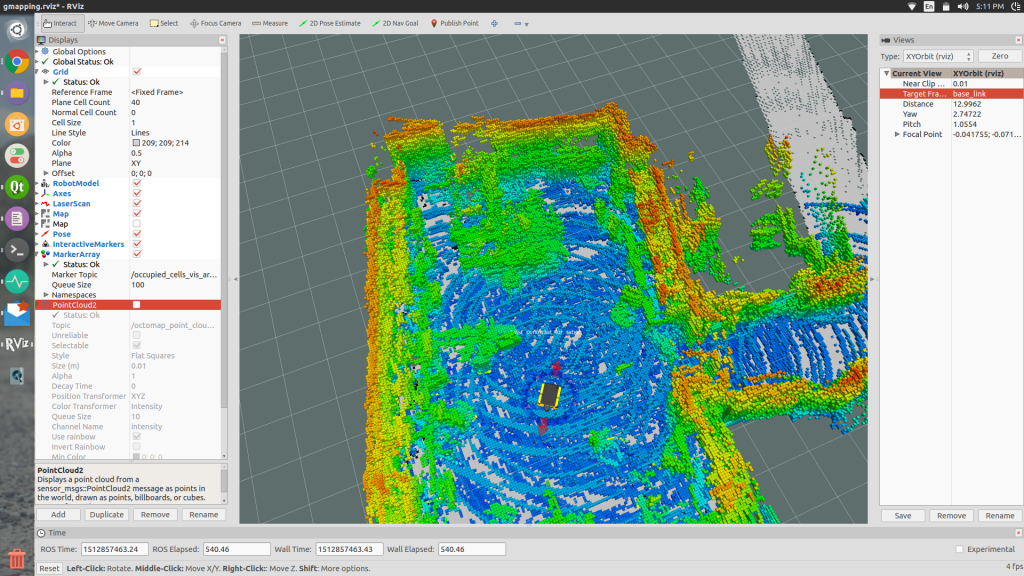
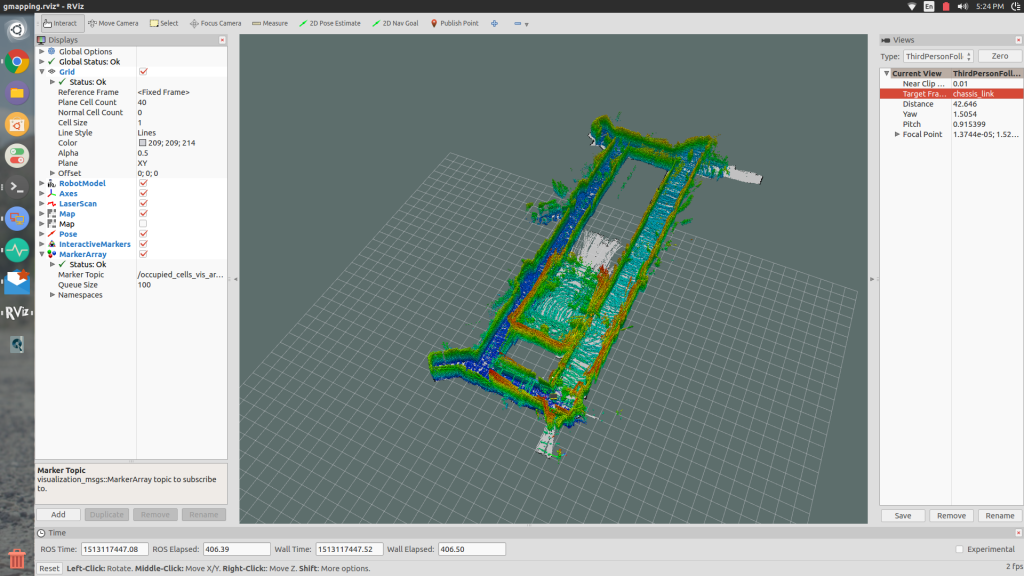
Heterogeneous Robotics: Cooperative Mapping Capability
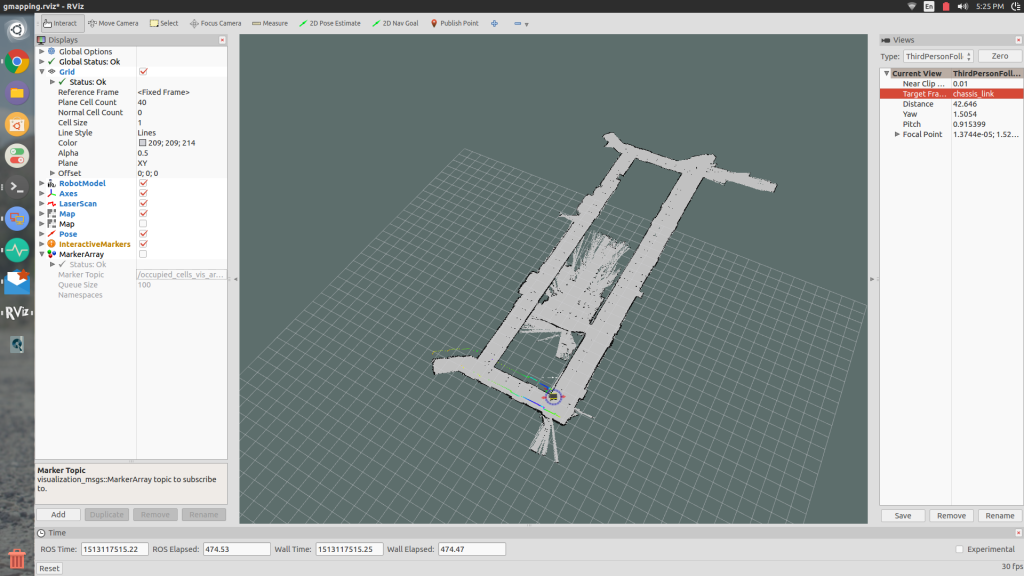
This project involves a ground vehicle equipped with camera, 2D and 3D lidars and a drone with stereo imaging system as well as gimbal mounted camera. GSLAM, OctoSLAM, MonoSLAM and ICP methodologies are studied. Goal is to merge stochastic solvers to generate a cooperative trajectory and a global combined map.