Heterogeneous Robotics
Heterogeneous Robotics: Cooperative Mapping Capability This project involves a ground vehicle equipped with camera, 2D and 3D lidars and a drone with stereo imaging system as well as gimbal mounted […]
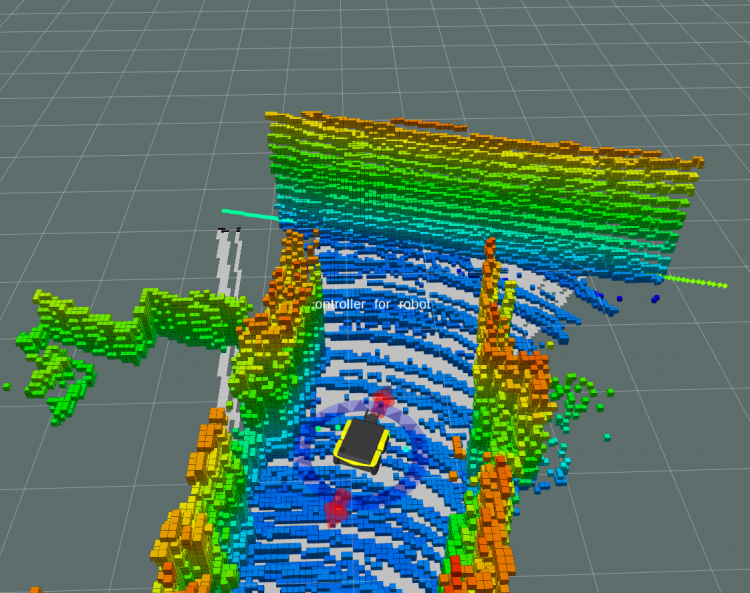
Heterogeneous Robotics: Cooperative Mapping Capability This project involves a ground vehicle equipped with camera, 2D and 3D lidars and a drone with stereo imaging system as well as gimbal mounted […]
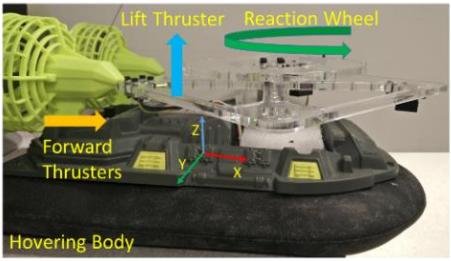
Hoverbot is a study in designing robots that can travel over multiple types of terrain. Hovercraft can travel over almost any non-porous surface, including sand, ice, and water. This is […]
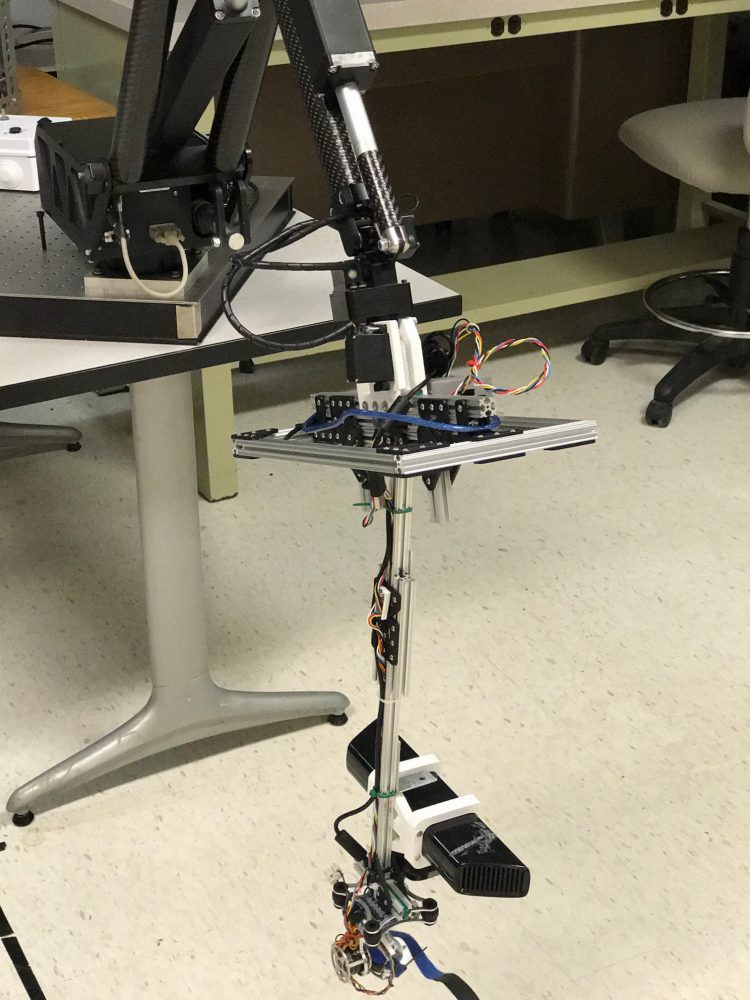
Octopus is a robotic arm and gimbal system designed for studying aggressive UAV maneuvers. It is capable of target finding and is equipped with an automated 3D Scanner. Project Members: […]
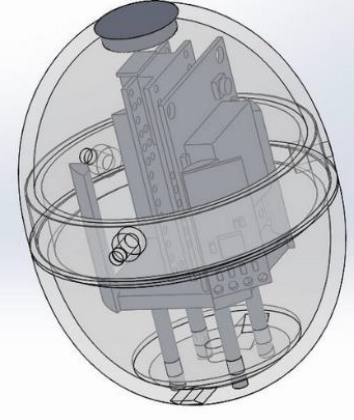
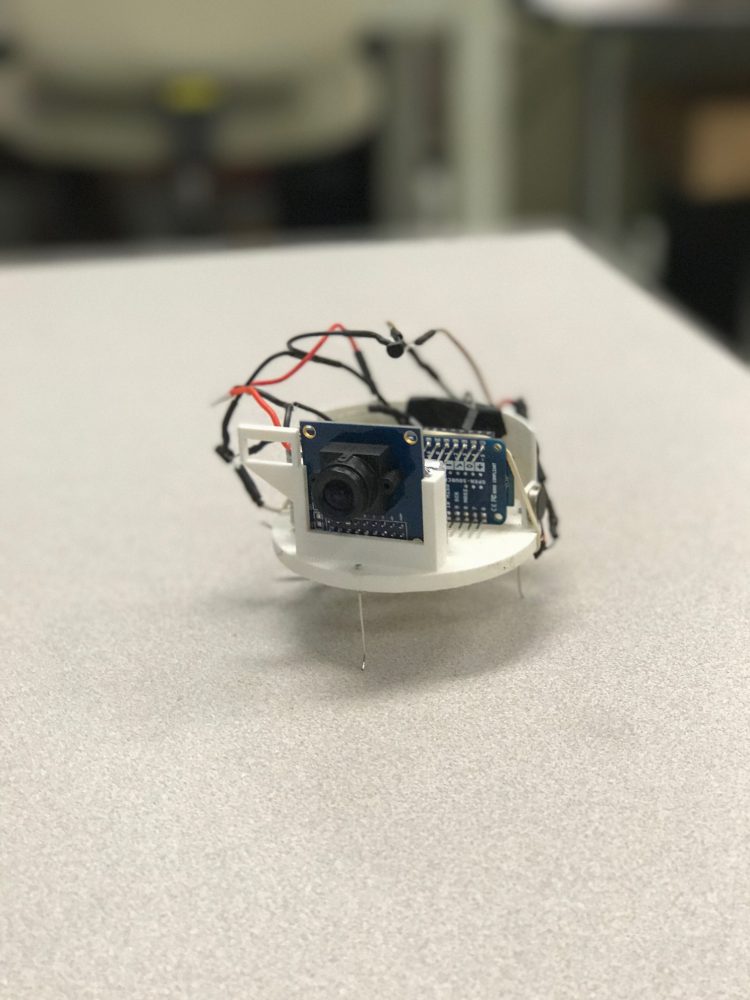
Bionic Egg: 3D Printed Mobile Sensor Packaging The goals of this research are to design a 3D printed small foot-print environmental data logger while considering sensor packaging space constraints and […]
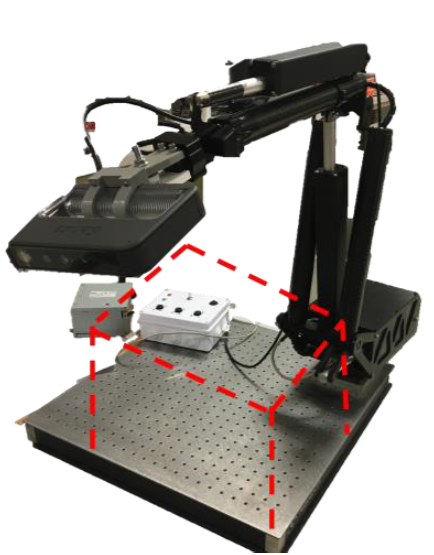
This project aims to manufacture a low-cost autonomous scanner with a reasonable resolution for small to medium size companies. We have used off-the-shelf low cost hand held scanner and mounted […]
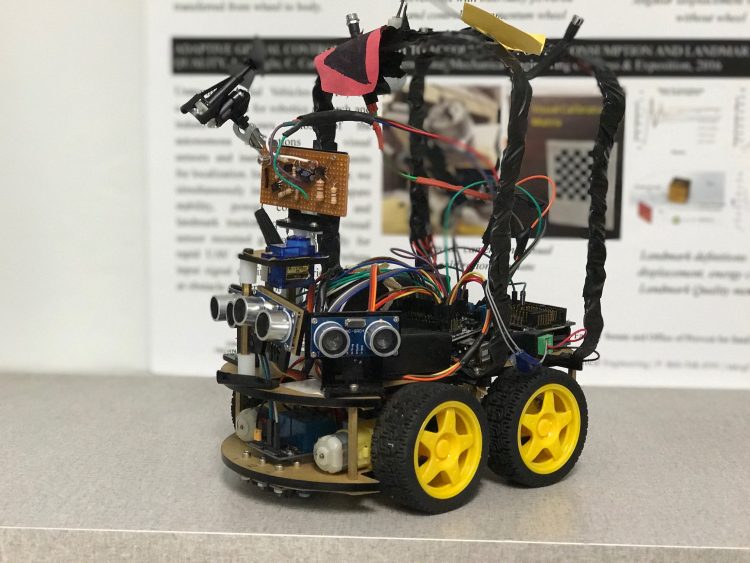
Bubble is a miniature robotics platform mainly used for educational purposes. It is a general purpose robot that can be equipped with a multitude of sensors in order to familiarize […]

The SpiderBot is designed as a motion study of spiders. Mimicking biological creatures can help inform design of robotic motion. The SpiderBot imitates the locomotion of a spider.
A new approach exists to the coordination of multirobot systems which consist of many small physical robots. Vibron is a robot proof of concept, designed minimally with no physically moving […]
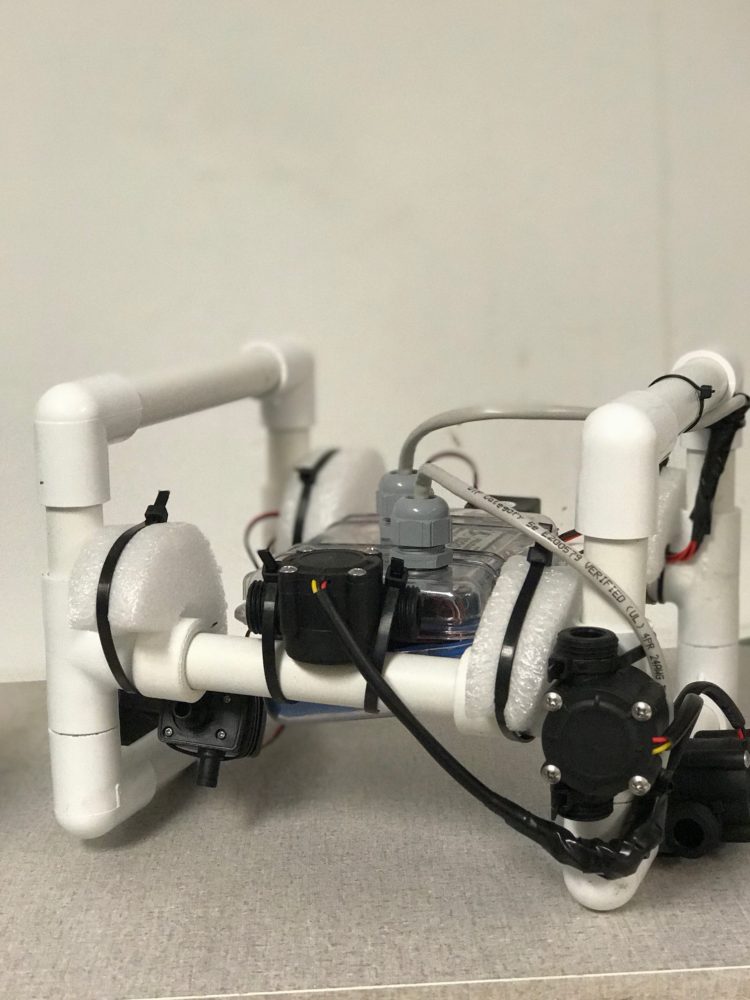
The Unmanned Underwater Vehicle (UUV) is a simple autonomous robot that travels underwater following predetermined cube like path. It was designed to study the unique design required for underwater robotics.

A ground vehicle with use of Mecanum wheels that can move in all directions. Project Members: Amber Ferrera Josephine Garcia Justin Simko Christopher Jaramillo