The research of the Autonomous Mobile Robotics (AMR) team is centered on the development of agile mobile robots and implementing their control systems. Our multidisciplinary group has 32 active members from ME, ECE, BM, MET and ECT majors. Weekly meetings and lectures are held on Tuesdays, hands-on workshops are held on Fridays.
The group has a high turnover of projects and experiments, in response to the rapid advances in robotics and A.I. areas. The group had completed five projects in last two years and currently works on five active projects. List of selected projects is given below.

Active Research Projects
[1] Solar Powered Self-Driving Golf Cart, Spring 2017 - Present
Current Students: Shuang Dai, Heston David Darlington, Jeffrey Severino, Day Moo, Amiel Bituin, Stephen DeRosa, Peter Klesczewski, Matthew Woodard,
[2] Remotely Operated Omni-Directional Robot, Spring 2016 - Present
Current Students: Ross Ackeifi, Ryan Merrikin, Adam DeVeau, Amber Ferrera, Josephine Garcia, Justin Simko
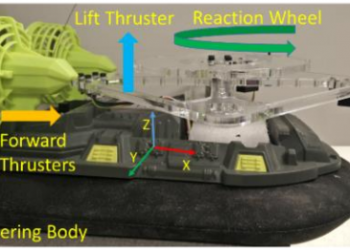
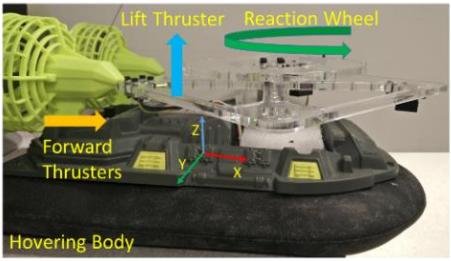
[3] Hovering Robot: Alternate Agile Motion Mechanisms, Fall 2015 - Present
Current Students: Jitendranath Karuturi, Poorna Pruthvi Malempati, SaiAditya Pagadala, Likhitha Mullapudi,
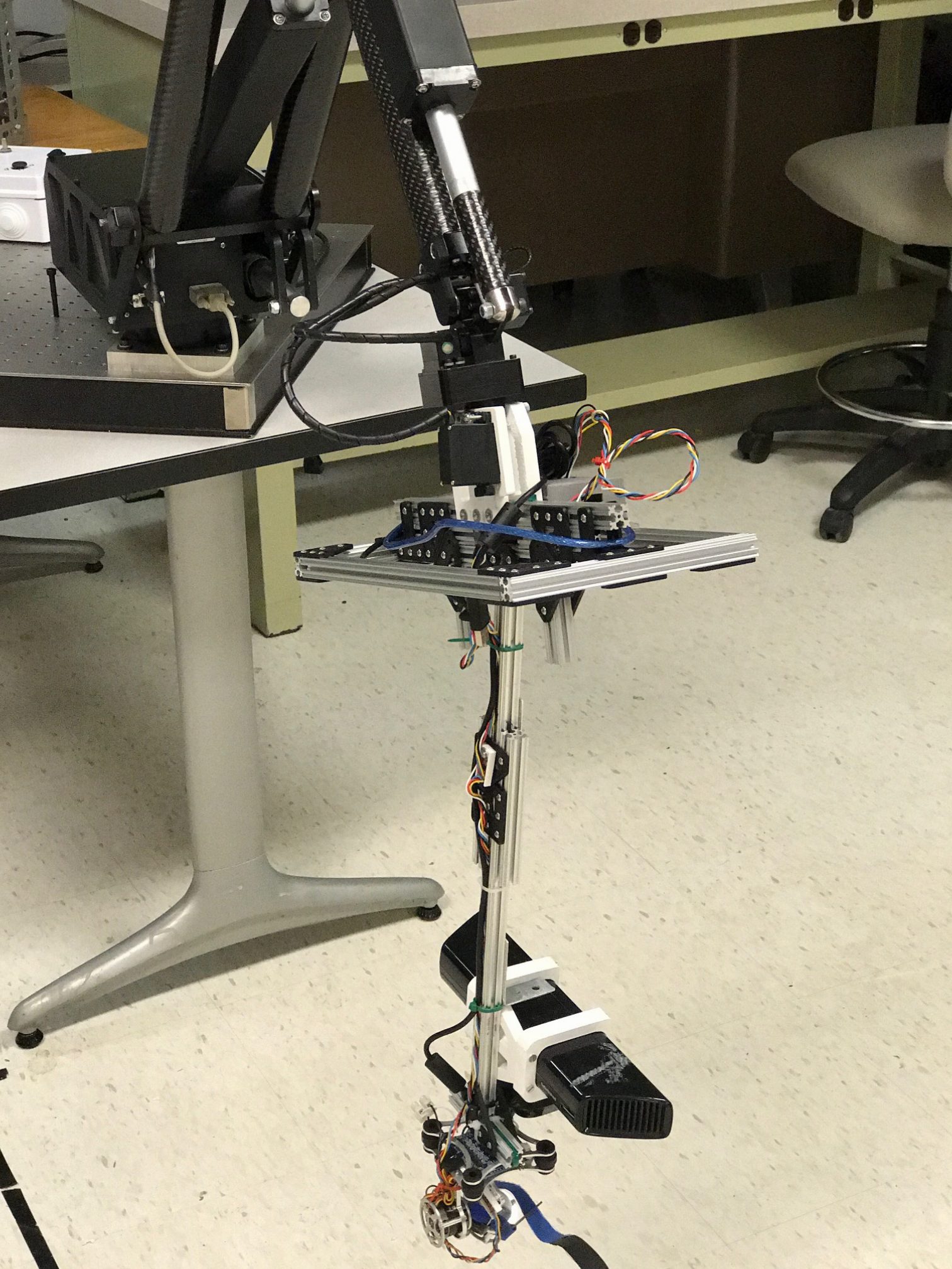
[4] Robotic Arm, Agile Quadcopter Motion Simulator, Fall 2016 - Present
Current Students: Ross Ackeifi, Kaelaan Maynor, Gouthamsai Bandarupalli
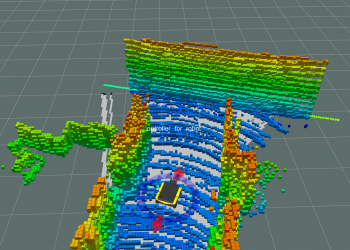
[5] Turret Controlled 3D Environmental Scanner, Fall 2017 - Present
Current Students: Scott Dion
Completed Projects
[6] Snow Plow Robot Spring 2017-Fall 2017
The Women's Advancement Initiative, Dorothy Goodwin Scholars Program Grant
Student: Theresa DeFreitas
[7] Rapid Control Systems Design and Development Utilizing Single Board Computers and Numerical Computing Environment Spring 2017
Student/Faculty Engagement Grant
Students: Stephen DeRosa, Eric Jacobson
[8] Development of a Mobile App for Citizen Science Noise Assessment,Spring 2016-Fall 2016
Paul S. Veneklasen Research Foundation
Students: Cote Colton, Uma Devi Pathuri, Benjamin Steers, Amer Mohammad, Colton Cote, Jeffrey Stone
[9] Accuracy Analysis of Unmanned Aerial Vehicle Visual Localization Systems Spring 2016
Student/Faculty Engagement Grant 2015-2016
Students: Hugo Santana, Nikhil Rametra, Ziair Deleon
[10] Controlling Angular Position of an Aerial Vehicle with Momentum Exchange Spring 2016
Students: Sean Greenhalge, Kevin Windheuser
[11] Bionic Egg: Smart, Ruggedized Remote Sensor Suite for Conditions, Fall 2016 – Spring 2017
Aviagen Group, External Research Grant
Students: Electrical Engineering: Simon Darius, Computer Engineering: Eric Jacobson, Mechanical Engineering: Theresa DeFreitas, Maegan Hall, Jerrod Sutcliffe
[12] Pyro: Autonomous Firefighting Mobile Robot, Fall 2016 – Spring 2017
Students: Electrical Engineering: Heather Volkens, Mechanical Engineering: Yousef Bahman, Ali Alsulaiman, Bryant Miranda
[13] Smart Arm 3D Scanner, Fall 2016 – Spring 2017
Students: Mechanical Engineering: Mason Paul, Gabriel Valero, Computer Engineering Technology: Hector Ortiz
[14] Fire Fighting Robot Team: SPARK, Fall 2016 – Spring 2017
Students: Mechanical Engineering: Yeshwanth Abburi, Nikhil Rametra
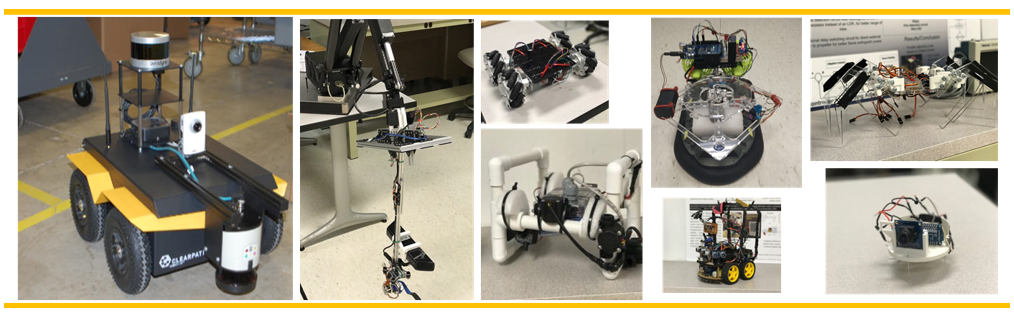
Selected Student Mechatronics Projects[Spring 2016-Spring 2017]
- 3-DOF Turret: Recognize and follow/aim an object in 3D space
- Underwater Robot: Follow a cube like pattern autonomously
- Mobile Robot: Maze solving
- Quadcopter: Follow a cube like pattern autonomously
- 2D Momentum Wheel: Angular control of a plane with momenta
- Spider Bot: 3D Printed multi joint spider like locomotion robot
- Anechoic Chamber Test Eq.: Accurate, multi-location sensor displacement
- Swarm Robotics: Multiple bug/insect robots that explores an environment cooperatively
- Multi-terrain Mobile Robot: Climbing stairs and traversing through rough terrain
- 3D Printed HoverBot: Controllable, multi-terrain robot
- Multi-purpose Robot: Tennis, Golf ball throwing, weight lifting, stairs climbing
- Trainable Robotic Arm: Easy to train self-learning manufacturing arm
Competitions Joined
- Trinity College International Robot Contest, Team Pyro, Spring 2017
- ASME Student Design Competition, The Robot Pentathlon: Citius, Altius, Ingenious, Spring 2017
- Trinity College International Robot Contest, Team Spark, Spring 2016
GRANTS AND FUNDED RESEARCH PROJECTS
PI: Akin Tatoglu
[1] “Aerial Vehicle Dynamic Object Tracking”. Funded by SBIR, subcontract
[2] “Innovation Place (IP) Robotics Program”. Funded by “CT Next Program” Grant, 2017
[3] “Development of a Mobile App for Citizen Science Noise Assessment”. Funded by Paul S. Veneklasen Research Foundation, 2015
[4] “Bionic Egg: Smart, Ruggedized Remote Sensor Suite for Conditions”. Funded by Aviagen Group
[5] “Improving Career Readiness with Multidisciplinary Project Based Peer Learning”, Funded by High Impact Practices, Goal-1 Grant, 2017
[6] “Snow Plow Robot”. Funded by The Women's Advancement Initiative, Dorothy Goodwin Scholars Program Grant, 2017
[7] “Implementing Self-Learning Skills with Multidisciplinary Robots Courses”. Funded by Center for Teaching Excellence and Innovation, Engaged Learning Fellowship, 2017
[8] “Rapid Control Systems Design and Development Utilizing Single Board Computers and Numerical Computing Environment”. Funded by Student/Faculty Engagement Grant, 2017
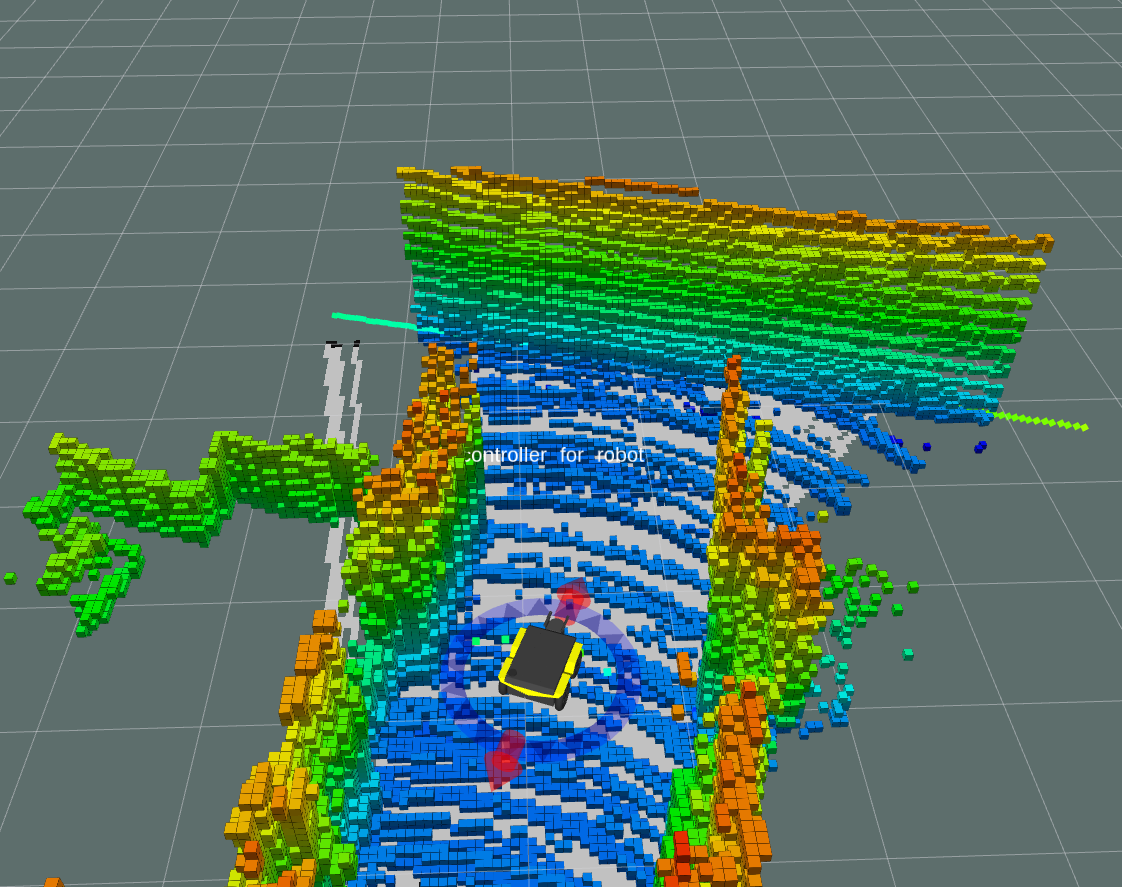
[9] “Autonomous 3D Mapping System”. Funded by Coffin Grant, 2016
[10] “Utilizing Robotics for Labs and Capstone Projects”. Funded by Student/Faculty Engagement Grant, 2016
{kind=link}
{kind=link}
{kind=link}
Members

Stephen DeRosa
Club President
Josephine Garcia
Secretary